|
人脑通过视觉,听觉,嗅觉和体感相互作用实现认知,学习和记忆任务。传统的冯・诺依曼架构很难模仿这个过程,额外需要事件驱动,自适应,并行/卷积计算和多模态塑化的复杂功能。类脑神经网络通常由各种人工突触器件,例如忆阻器和晶体管组成,通过更新突触权重来进行信息传输和处理。新兴的光子突触结合了光和电神经形态调制和计算,提供了具有高带宽,快速度,低串扰且大大降低功耗的有利选择。为了模拟更实用的神经系统,最好在多步或多模态可塑性策略中更新连接权重,以传递更灵活和灵巧的突触可塑性。突触设备中的顺序(或叠加)多模态调制也是实现复杂神经行为和活动的基础,这仍然是对常规人工突触的重大挑战。因此,神经形态系统的新架构迫切需要将多模态交互/耦合多样化,以实现交互式图像识别和感知辅助指令执行。
有鉴于此,近日,中科院北京纳米能源与系统研究所王中林院士和孙其君研究员(共同通讯作者)等提出了具有协同机械和光学可塑性的仿生机械-光子人工突触。人工突触由基于石墨烯/MoS2异质结的光电晶体管和集成的摩擦电纳米发电机组成。通过用摩擦电势控制异质结中的电荷转移/交换,可以容易地调节光电突触行为,包括突触后光电流,持续光电导和光敏性。在机械位移和体现不同时空信息的光脉冲的协同作用下,对光子突触可塑性进行了详尽的研究。此外,模拟了人工神经网络以证明在机械塑化的帮助下可将图像识别准确度提高到92%。机械-光子人工突触对于实现混合模式相互作用,模拟复杂的生物神经系统以及促进交互式人工智能的发展具有很高的前景。文章以“Bioinspired mechano-photonic artificial synapse based on graphene/MoS2 heterostructure”为题发表在著名期刊Science Advances上。
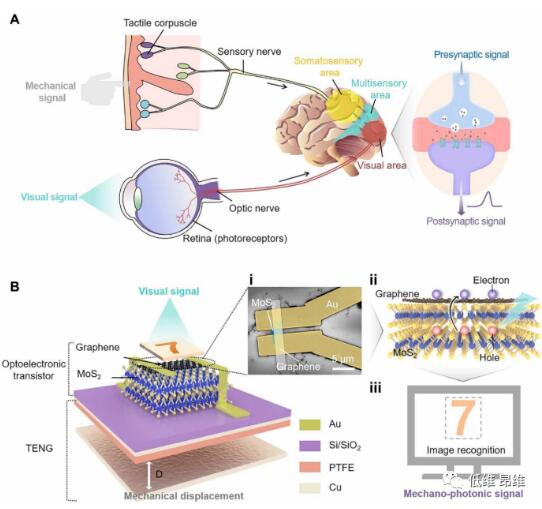
图1. 生物触觉/视觉神经元和机械-光子人工突触。(A)生物触觉/视觉感官系统的示意图。(B)基于石墨烯/MoS2(Gr/MoS2)异质结的机械-光子人工突触的示意图。
人脑的感知和认知能力以及相关的生物力学和视觉感官对获取体感和视觉信息至关重要。大脑包围了许多神经元,以不同形式接收交互信号(例如机械和光学信号),并在多感官关联区域中实现了跨模态神经形态计算。突触是两个相邻神经元的连接点,在神经信息传递中也起着至关重要的作用(图1A)。受大脑和神经系统的启发,本文试图证明具有机械和光学可塑性协同作用的机械-光子人工突触,示意图如图1B所示,包括一个基于Gr/MoS2异质结的光电晶体管和一个集成的TENG。在光电晶体管中,化学气相沉积的单层石墨烯堆叠在多层MoS2薄片上(图1B,i)。在杂化Gr/MoS2结构中,MoS2中的光生电荷载流子可以通过静电能带弯曲转移到石墨烯上(图1B,ii)。界面势垒阻止了光生电子-空穴对的快速复合,并导致了持久的光电导,这有利于模拟生物突触的衰减行为。集成的TENG组件由接触-分离模式下的Cu/聚四氟乙烯(PTFE)/Cu组成,其中一个摩擦层(PTFE/Cu)连接到晶体管栅极,另一个Cu电极作为可移动的反摩擦层。TENG两个摩擦层之间的机械位移(D)可以引起摩擦电势耦合到晶体管,这可以直接影响晶体管沟道中的电荷转移/交换,并调节光电突触的光电流(图1B,iii)。因此,机械-光子人工突触可以实现对突触可塑性的协同机械和光学调制。
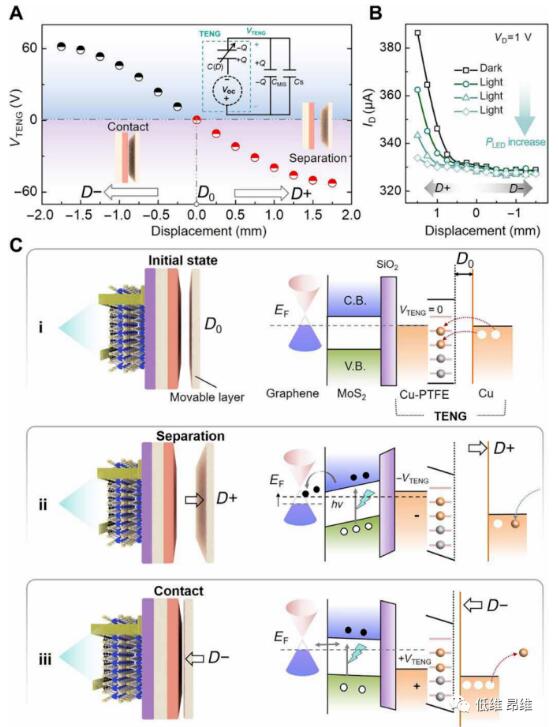
图2. 基于Gr/MoS2异质结的机械-光电晶体管以及相应的工作机理。(A)TENG输出电压(VTENG)与位移(D)的关系。(B)在黑暗中和不同绿光功率强度(PLED)下的转移曲线。(C)基于Gr/MoS2异质结的机械-光电晶体管的工作机理。
为了确保摩擦电势栅控的可行性,首先通过测试电路来表征TENG输出电压(VTENG,等于栅极电压)与机械位移的关系,其中晶体管电介质电容器(CMIS)和测试系统电容器与TENG并联连接(图2A)。集成的TENG可以提供范围为62至-52 V的等效栅极电压(VG),位移范围为-1.75至1.75 mm。可移动层的初始预设位置定义为D0=0,VTENG=0(静电平衡状态)。TENG的分离(D+)和接触(D-)运动可以分别引起耦合到晶体管的负栅极电压和正栅极电压。为了表征机械-光电晶体管,在TENG位移和不同功率强度绿光LED光照的协同作用下,测量了输出性能。随着PLED在D>-0.1 mm的区域内增加,ID明显减小(图2B)。但是,在D<-0.1 mm的范围内没有明显变化。机械位移下的光电性能与施加VG时的情况一致。根据图2A,-0.1 mm的TENG位移等于~5 V的MoS2导电阈值。
机械-光电晶体管的工作机制如图2C所示。初始预设位置(D0)是静电平衡状态,其中Cu电极和PTFE/Cu摩擦层之间的电荷转移已经完成,并且转移的电荷通过接地被中和。在这种状态下,没有摩擦电势施加到晶体管,并且Gr/MoS2异质结处于平带状态,没有电荷转移/交换(图2C,i)。当两个摩擦层分开时(D+,TENG中的转移电子不能被中和),诱导的-VTENG耦合到晶体管栅极,石墨烯费米能级向下移动,并导致石墨烯产生空穴静电掺杂。在光照下并进一步分离TENG直至-VTENG<VT,光生电子从MoS2的导带注入到空穴掺杂的石墨烯的低能级中(图2C,ii)。如图2B所示,电子的额外注入会增加石墨烯的电阻并导致在光照下电流减小。当两个摩擦层彼此接近(D-)时,会感应+VTENG并将其耦合到晶体管栅极,这是因为TENG中的更多电子被转移到了接地,并留下了正电荷。当+VTENG增加到高于VT时,MoS2中的能带将由于在此阶段具有近乎金属的特性而变得平坦(即通过+VTENG>VT进行栅控)。MoS2的平带抑制了电子向石墨烯注入并平衡了Gr/MoS2异质结中的载流子分布(图2C,iii)。基于电场依赖的费米能级和电子态,更大的正位移(D+)会引起更大的光电流和更高的光响应率。与机械位移有关的可调光响应对于提高器件的光敏性或根据需要将光敏性调节到所需的水平具有重要意义。
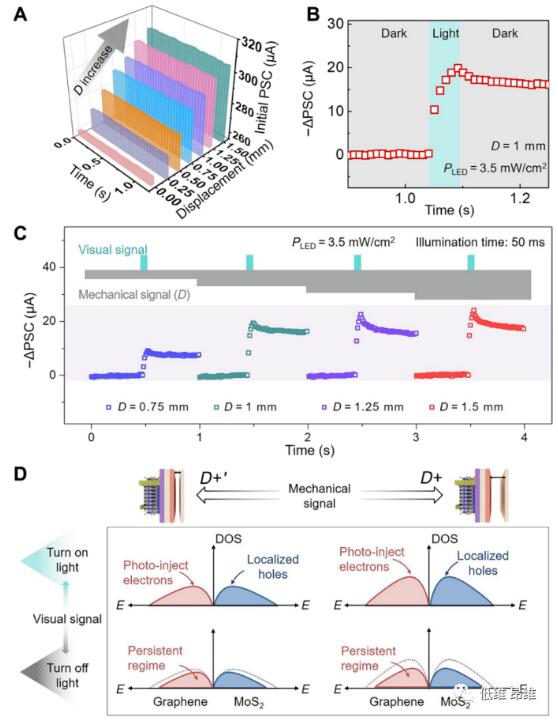
图3. 基于Gr/MoS2异质结的机械-光子人工突触。(A)在黑暗中实时评估初始PSC,D从0到1.5 mm不等。(B)在D=1 mm和PLED=3.5 mW cm-2,光脉冲宽度为50 ms时,人工突触的光激活突触后电流(-ΔPSC)。(C)在光照和不同D协同作用下的-ΔPSC。(D)在两个不同的位移状态(D+和D+')下,光照下和光照后(持久光电流区域),Gr/MoS2异质结中态密度和载流子分布的示意图。
通过机械位移和光照可以容易地调节Gr/MoS2晶体管的沟道电导率(即突触权重),这是机械-光子人工突触中多模态可塑性的基础。当位移从0变为1.5 mm时,基础突触后电流(PSC;即在黑暗状态下Gr/MoS2晶体管的ID)从260 μA到308 μA呈现出明显的变化趋势(图3A),与图2B中的转移特性匹配。在不同的位移状态下,PSC也可以在不同的水平上保持稳定,这是确保对突触光响应进行可靠研究的前提。以D=1 mm为例,当器件被绿光脉冲照亮(PLED=3.5 mW cm-2;脉冲宽度50 ms)时,光激活的突触后电流显示出明显的负增量(定义为-ΔPSC)降低20 μA,并且在光关闭后趋于在~18 μA的较低水平饱和(图3B)。在单个光脉冲下的这种电学特性类似于生物突触中的长时程抑制(LTD)行为(几秒钟到几分钟)。在机械-光子人工突触中,位移会影响基础PSC的水平,而光照会导致PSC的动态变化。这意味着摩擦电势调制的电学行为和光电行为可以协同影响PSC。在图3C中研究了在位移和光照协同调制下对应的-ΔPSC。视觉信号由相同的绿光LED(PLED=3.5 mW cm-2;脉冲宽度50 ms)施加,而机械位移作为状态参数应用,具有四个不同的值(0.75、1、1.25和1.5 mm)。当D从0.75到1.5mm变化时,-ΔPSC的峰值从9增加到24 μA。这些结果为在长时程突触可塑性上实现协同机械和光学调制提供了有力的证据。
为了探索潜在的机理,PSC的减少可以归因于石墨烯中空穴的减弱,而持久的PSC是由MoS2中局部状态和方向性摩擦电场(即等效栅极电场)确定的协同结果。光照时,在MoS2中会感应出光生电子-空穴对。负摩擦电场(在D+处)驱动电子和空穴分别向石墨烯和相反的方向移动。光生电子被注入到空穴掺杂的石墨烯中,从而降低了空穴的有效密度(增加了石墨烯的电阻)并引起PSC降低(-ΔPSC=20 μA)。当光关闭时,一小部分电子-空穴对逐渐进入复合过程,导致-ΔPSC轻微恢复至~18 μA。但是,Gr/MoS2界面处的势垒阻止了光生电子完全扩散回MoS2。因此,形成了光注入电子和局部空穴的持续状态,并导致了随后的持续PSC。与较大的D状态相比,在较小的位移状态下(D+',例如D=0.75 mm),由于光激发可用的自由电荷载流子有限,初始低基础PSC导致-ΔPSC的幅度较小(图3C)。在这种情况下,分配给光注入电子和局部空穴密度的持久态将较小(图3D,左)。当施加的D+小于0.5mm(等效VG趋于增加并接近VT,即MoS2传导阈值)时,由光脉冲触发的-ΔPSC进一步降低,直到在D=0时没有观察到明显的PSC变化为止。这归因于MoS2开始表现出超出导电阈值的近金属特性,并抑制了光生电子的注入。持久性PSC的擦除过程可以通过TENG接触脉冲(即D-,等效于更正的VG)轻松实现,它可以瞬时提高VT上的费米能量,并重新分配Gr/MoS2异质结中的电荷载流子。与以前具有单模态处理能力的仿生突触器件的研究相比,机械-光子人工突触可以同时通过机械和视觉信号实现双模态塑化。
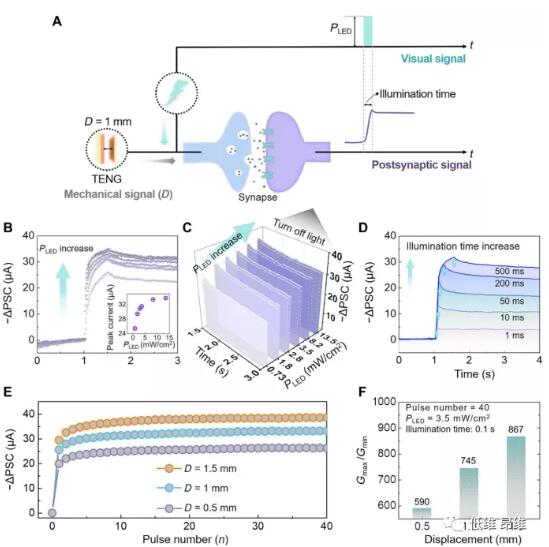
图4. 机械和视觉信号对机械-光子人工突触的协同作用。(A)协同机械和光学信号的示意图。(B)在固定D为1 mm,VD=1 V且光脉冲宽度为0.5 s的情况下,不同PLED下的-ΔPSC。(C)光关闭时,不同PLED下的-ΔPSC。(D)在不同光脉冲宽度下的-ΔPSC。(E)不同位移下连续40个光脉冲的-ΔPSC。(F)电导裕度(Gmax/Gmin)与位移的关系。
为了进一步探讨机械和光学调制对人工突触的协同效应,在体现不同时空信息(例如光强度和光照时间)的光脉冲输入下研究了更多的-ΔPSC。人工突触的机械和光学塑化协同效应的示意图如图4A所示。在1 mm的固定D下,随着PLED从0.73增大到13.5 mW cm-2,-PSC的峰值从26 μA增加到35 μA(负增量)(图4B)。这是由于更多的光生载流子在更强的光下被激发,有助于降低石墨烯的电导率并导致PSC降低。当光关闭时,所有电流都会略有下降,并趋于维持在较低的电流水平(图4C),表现出可重复的LTD突触行为。不同的光照时间反映了光脉冲的时间信息,决定了每单位时间的光生载流子。当光照时间从1 ms增加到500 ms时,最大-PSC振幅显示出从4.67到32 μA的显著增加趋势(图4D)。光强度和光照时间均可用于实现对突触抑制行为的光学调制。在图4E中研究了多个连续光脉冲在不同位移下对机械-光子人工突触的影响。当位移从0.5增大到1.5 mm时,-ΔPSC显示出整体增加的趋势。还引入了另一个重要参数电导裕度(Gmax/Gmin,定义为最大电导值与最小电导值之比),以详细说明TENG位移对突触后电流的影响。如图4F所示,在3.5 mW cm-2的光照功率下,随着D从0.5到1.5mm变化,脉冲数为40的PSC与初始PSC之间的电导裕度从590增加到857。机械位移下多重光脉冲增强的突触可塑性在模仿记忆和监督学习功能方面具有巨大潜力。
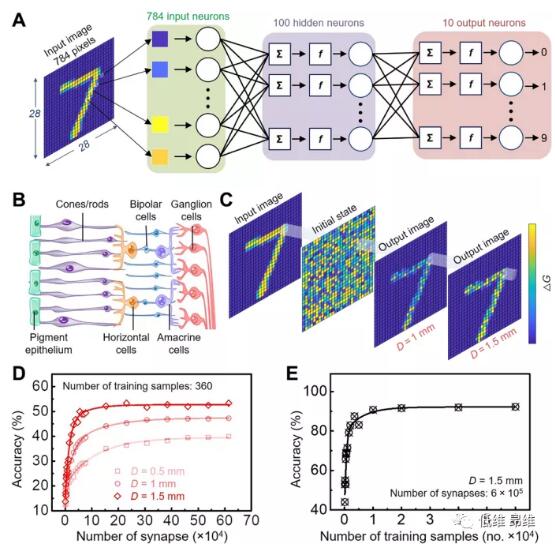
图5. 机械-光子人工突触对ANN进行图像识别的仿真。(A)具有784个输入神经元,100个隐藏神经元和10个输出神经元的模拟ANN的示意图。(B)视网膜神经网络的示意图。(C)从ANN获得的成像示例。(D)不同数量突触对视觉信号刺激的识别精度。(E)不同数量训练样本对视觉信号刺激的识别精度。
基于机械和光学可塑性在人工突触中的协同效应,通过使用典型的突触特性对MNIST手写图像数据进行监督学习功能,对基于多层感知的ANN进行了模拟。ANN由28×28个输入神经元,100个隐藏神经元和10个输出神经元组成,如图5A所示。通过隐藏层,所有三个层都通过突触权重完全连接。如图5B所示,人工神经网络的灵感来自视网膜,其中数十亿个神经细胞纵横交错,形成一个复杂的三层网络(第一个是感光层,第二个是中间神经细胞层,包括双极/水平/分泌细胞,第三层是神经节细胞层)。视网膜中的神经网络通过神经元和突触执行视觉信息处理和传输。根据上述生物学过程,基于机械-光子人工突触的双模态调制行为,将反向传播权重更新算法(BP)用于ANN仿真:(i)协同的机械和光学可塑性,以及(ii)通过机械位移可调的ΔPSC和持久PSC。图5C中显示了输入图像(数字“7”),初始状态图像和经过监督学习后在不同位移下的两个输出图像。初始状态电导在学习之前是随机分布的。在具有光照和机械位移(D从1到1.5 mm)的协同模拟条件下对图像进行监督学习之后,每个像素的ΔG值明显增加,并且图像的特征数字突出显示。该结果表明了双模态塑化在模拟用于图像识别的监督学习功能中的可行性。通过增加突触和训练样本,进一步评估了ANN模拟的识别精度。图5D演示了通过360个训练样本(进行监督学习后,在不同位移状态下输入图像的识别精度。当D从0.5到1.5 mm变化时,在6×105突触数量的情况下,最大识别精度可以从37%提高到54%。通过增加训练样本可以进一步提高识别精度。如图5E所示,当D固定为1.5 mm(突触数量为6×105),当训练样本的数量从360增加到10,000时,识别精度可以很容易地从54%提高到90%。当训练样本的数量增加到60,000时,最大识别精度可以达到92%。
本文成功地证明了基于Gr/MoS2异质结的机械-光子人工突触,具有协同多模态突触可塑性。摩擦电势用于驱动突触晶体管并调节异质结中的电荷转移/交换,从而促进光子突触的典型行为,包括突触后光电流,持续光电导和光敏性。此外,在机械位移和时空光脉冲的协同作用下,在机械-光子人工突触中也实现了长期记忆和连续的神经促进作用。进一步模拟了人工神经网络,证明了机械塑化在提高图像识别精度方面的可行性。机械-光子人工突触为实现双模态突触可塑性提供了一种有效的方法,能够作为一种通用的塑性策略,可以很容易地扩展到不同类型的材料和器件中,例如基于界面功能化电荷陷阱层的存储器件,浮栅光电晶体管以及离子/质子栅控晶体管等。本文提出的机械-光子人工突触也为多功能和交互式神经形态器件的开发铺平了道路。
文献信息:
Bioinspired mechano-photonic artificial synapse based on graphene/MoS2 heterostructure
(Sci. Adv., 2021, DOI:10.1126/sciadv.abd9117)
文章来源:低维 昂维 | 


